Search
-
Re: [3DSMax] Pole Vector equivalent in Max?
 The hip/ball joint is basically the same as a clavicle. Conventionally you would rig it to move automatically as a reaction to what the arm is doing. Attempting to include it in the same IK chain as the leg shifts the plane that the IK works in away from the plane that the knee joint needs to bend. The knee of the IK chain…
The hip/ball joint is basically the same as a clavicle. Conventionally you would rig it to move automatically as a reaction to what the arm is doing. Attempting to include it in the same IK chain as the leg shifts the plane that the IK works in away from the plane that the knee joint needs to bend. The knee of the IK chain… -
Re: [3DSMax] Pole Vector equivalent in Max?
In short you're doing it wrong. The ik solvers in max work in a single plane so in this case youll never get a correct knee bend. Run the controller from the thigh to the foot and for now, drop the extra knee joint(walk before you run) If memory serves you can just link a swivel target into the controller from the motion… -
[3DSMax] Pole Vector equivalent in Max?

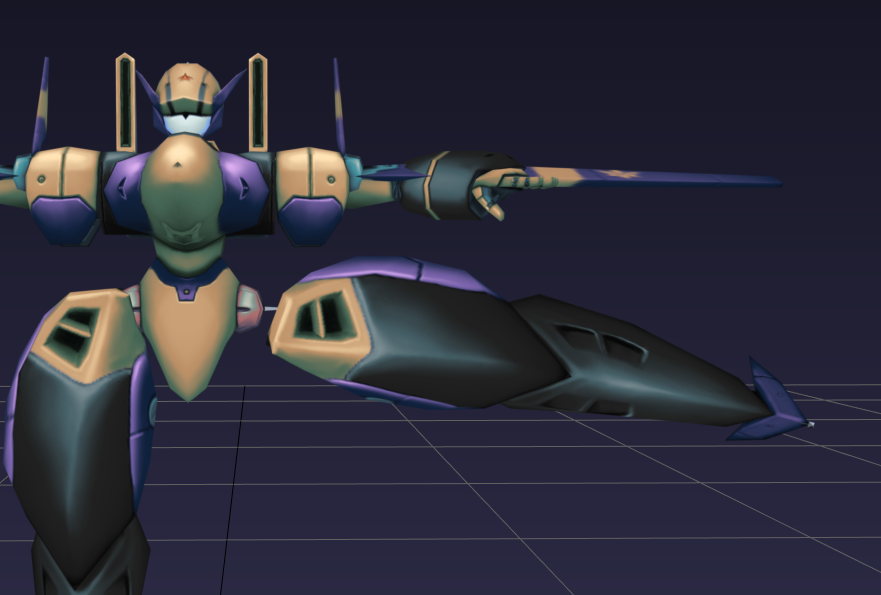
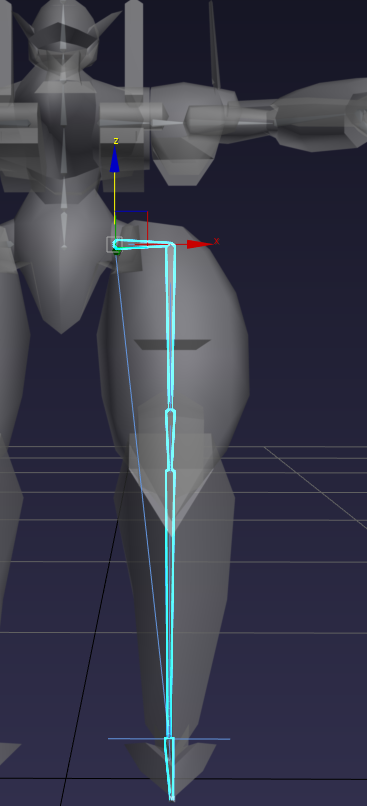 I've been working on building an IK setup for a game mesh so I can more easily animate it, but I'm having near constant problems with actually keeping the leg aligned forward in bends. In order to keep the joints moving as intended, I have the skeleton like this. However, an issue occurs with the IK in that it wants to…
I've been working on building an IK setup for a game mesh so I can more easily animate it, but I'm having near constant problems with actually keeping the leg aligned forward in bends. In order to keep the joints moving as intended, I have the skeleton like this. However, an issue occurs with the IK in that it wants to… -
Re: [3DSMax] Pole Vector equivalent in Max?
 There isn't an easy way to make this joint work straight down. It's an inherent issue with the design. Moreover, the extra knee joint is not an issue, it was the easiest thing to solve in the whole chain by just limiting angles. I solved that in seconds. the balljoint is where my issues lie. having outside the IK defeats…
There isn't an easy way to make this joint work straight down. It's an inherent issue with the design. Moreover, the extra knee joint is not an issue, it was the easiest thing to solve in the whole chain by just limiting angles. I solved that in seconds. the balljoint is where my issues lie. having outside the IK defeats… -
Re: [3DSMax] Pole Vector equivalent in Max?
 I bought a really good one about 8-9 years ago but that seems to have disappeared. This seems to cover most of the basics. although they don't cover auto clavicle rotation, it does explain ik/fk blending so you'll get an idea of how to weight multiple constraints against each other - which is what you need to do.…
I bought a really good one about 8-9 years ago but that seems to have disappeared. This seems to cover most of the basics. although they don't cover auto clavicle rotation, it does explain ik/fk blending so you'll get an idea of how to weight multiple constraints against each other - which is what you need to do.…
5 results