The BRAWL² Tournament Challenge has been announced!
It starts May 12, and ends Oct 17. Let's see what you got!
https://polycount.com/discussion/237047/the-brawl²-tournament
It starts May 12, and ends Oct 17. Let's see what you got!
https://polycount.com/discussion/237047/the-brawl²-tournament
[Maya] Need help with some rigging, can't figure out how to make a handle adapt to changes
polycounter lvl 5
I'm almost done with this bipedal rig, but I have one last thing I'm trying to set up that I can't find a tutorial on.
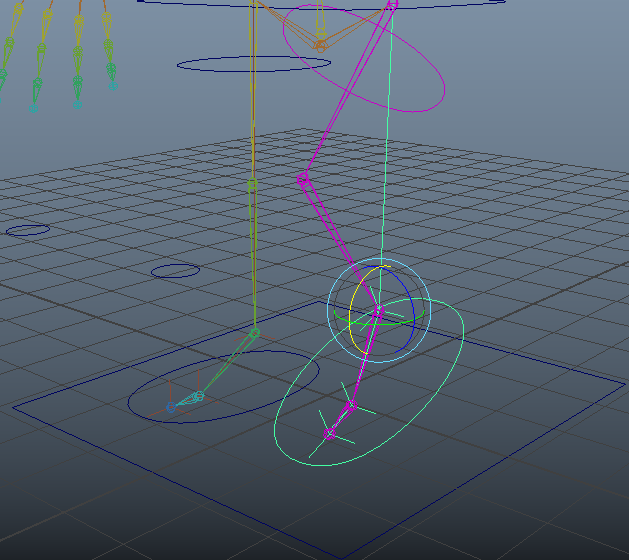
I want a setup where the upper leg control can move the whole leg, including the foot, and I also want this control to be able to follow whatever changes happen to the leg bones as well, so it can fit within the mesh. This is sort of hard to explain but I'll try and explain what I mean through pictures:

This is currently what the setup looks like.
I want the end result to be something that looks sort of like THIS if you were to just move the foot by itself (I achieved this by just aiming the upper handle to a null group I put in the knee). My thinking is that letting the upper joint move independently will allow it to be visible and in the right spot after it bends. I'm assuming I can animate with this, I don't know since I haven't done a rig this complex before.
The problem here is that being able to have the upper leg adapt to the foot and having the foot adapt to the upper leg is a contradiction, so if I try and parent the foot to the rest of the leg right now, I'll get a rig that doesn't want to cooperate.

So what if I just skip the aiming thing and just parent the foot to the leg? This motion is fine but...

If I want to move the foot afterwards, the upper handle doesn't move with it and I get a rig that does technical work, but it looks really strange and might produce misleading results.
Does anyone know how I might be able to fix what I currently have here? Should I just avoid trying to have the one rig "follow" the other? Or am I missing something? Thanks.
I want a setup where the upper leg control can move the whole leg, including the foot, and I also want this control to be able to follow whatever changes happen to the leg bones as well, so it can fit within the mesh. This is sort of hard to explain but I'll try and explain what I mean through pictures:
This is currently what the setup looks like.
I want the end result to be something that looks sort of like THIS if you were to just move the foot by itself (I achieved this by just aiming the upper handle to a null group I put in the knee). My thinking is that letting the upper joint move independently will allow it to be visible and in the right spot after it bends. I'm assuming I can animate with this, I don't know since I haven't done a rig this complex before.
The problem here is that being able to have the upper leg adapt to the foot and having the foot adapt to the upper leg is a contradiction, so if I try and parent the foot to the rest of the leg right now, I'll get a rig that doesn't want to cooperate.
So what if I just skip the aiming thing and just parent the foot to the leg? This motion is fine but...
If I want to move the foot afterwards, the upper handle doesn't move with it and I get a rig that does technical work, but it looks really strange and might produce misleading results.
Does anyone know how I might be able to fix what I currently have here? Should I just avoid trying to have the one rig "follow" the other? Or am I missing something? Thanks.