Can't finish my rig in modo
polycounter lvl 11
Hello,
For some reason the rig gets twisted once I place the up vector on the IK, please help.
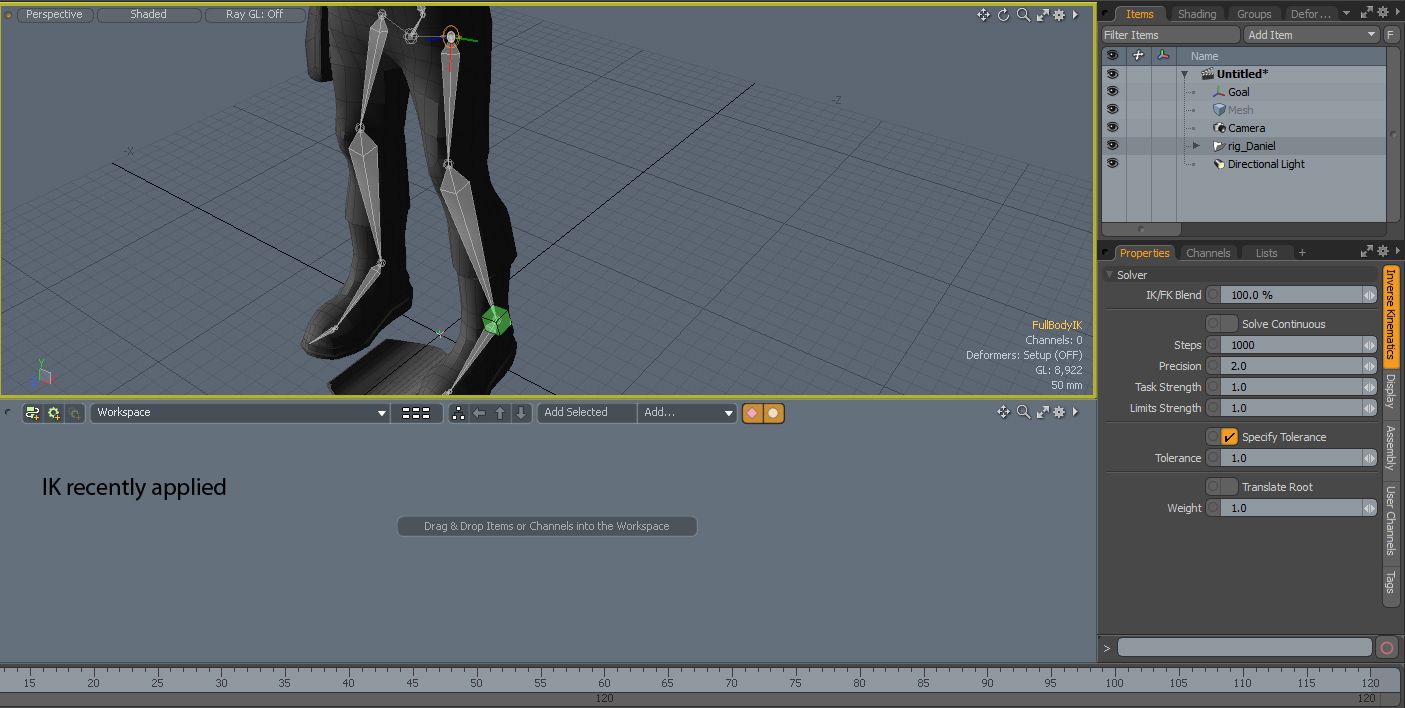
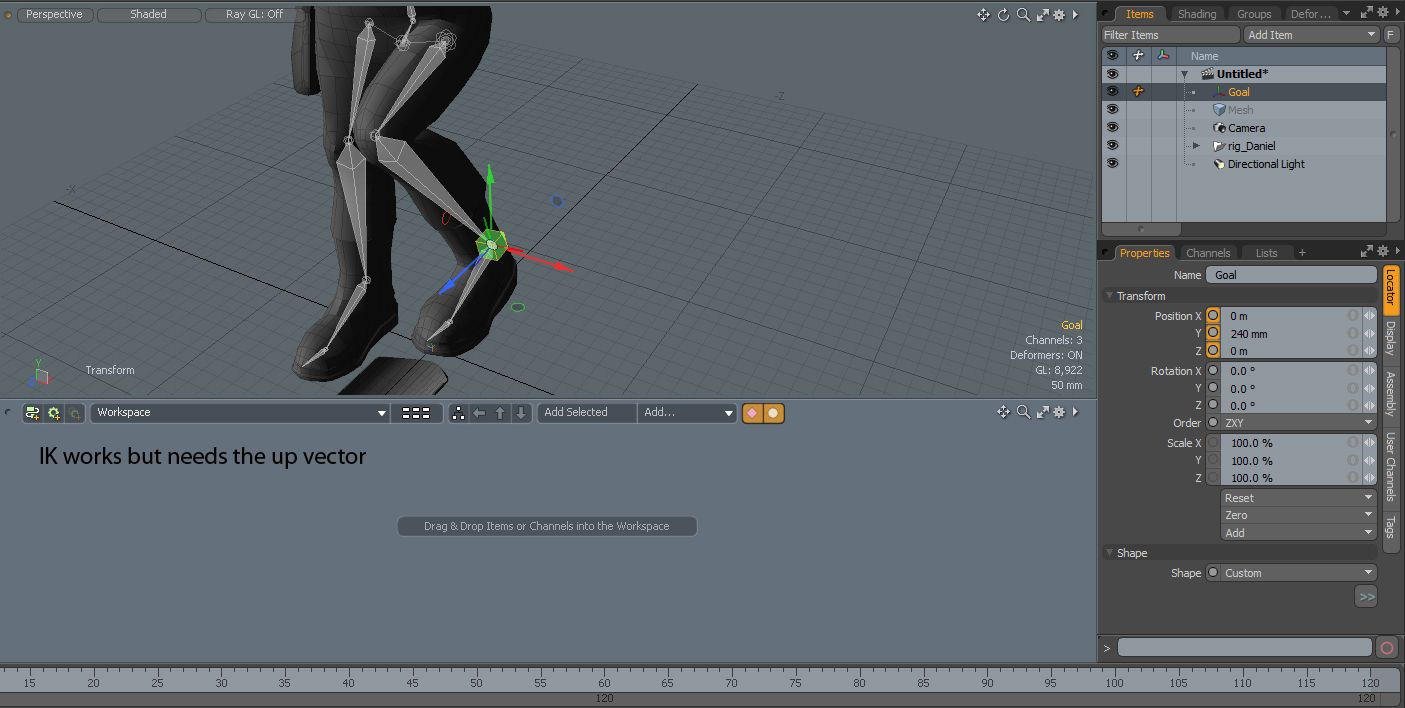
I constrain the locator from the start to the goal using "direction" and this happens all the time
For some reason the rig gets twisted once I place the up vector on the IK, please help.
I constrain the locator from the start to the goal using "direction" and this happens all the time
Replies
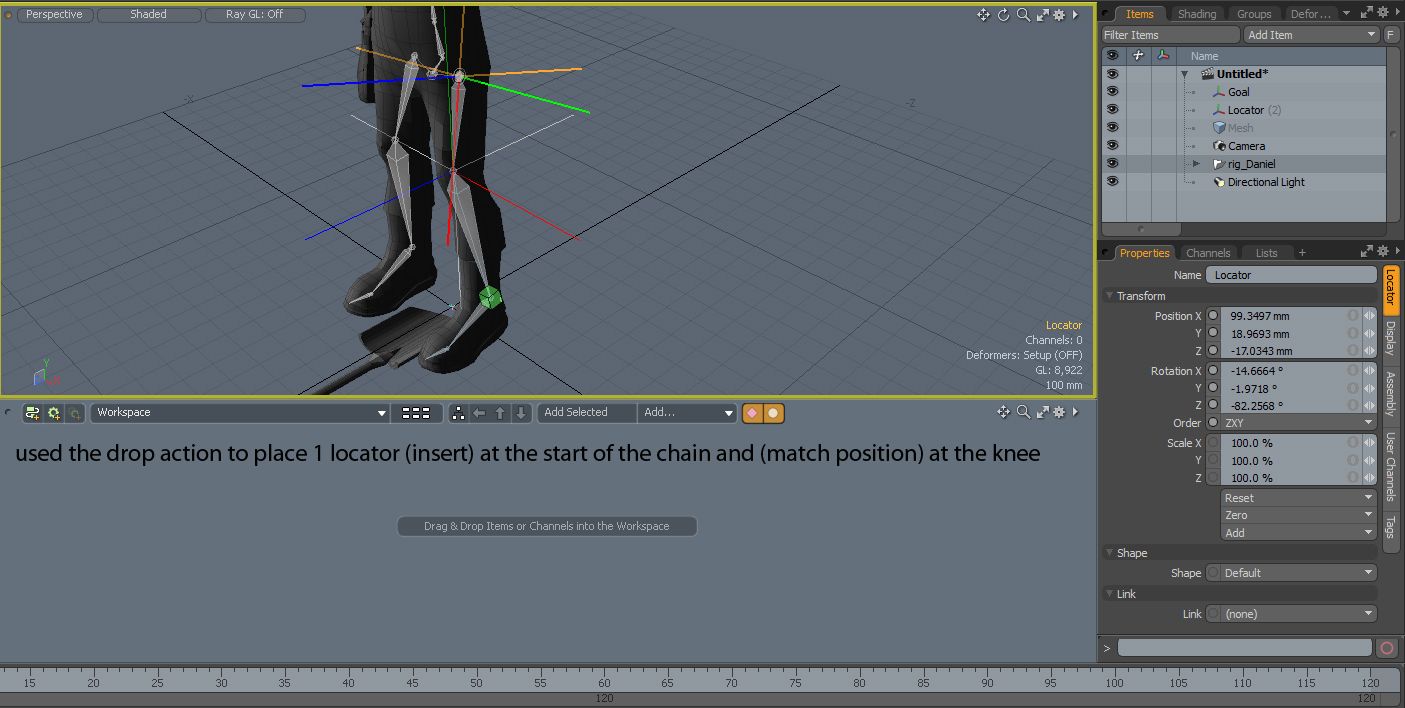
Thanks for the help man, I already tried that and didn't help, what I found so far is this:
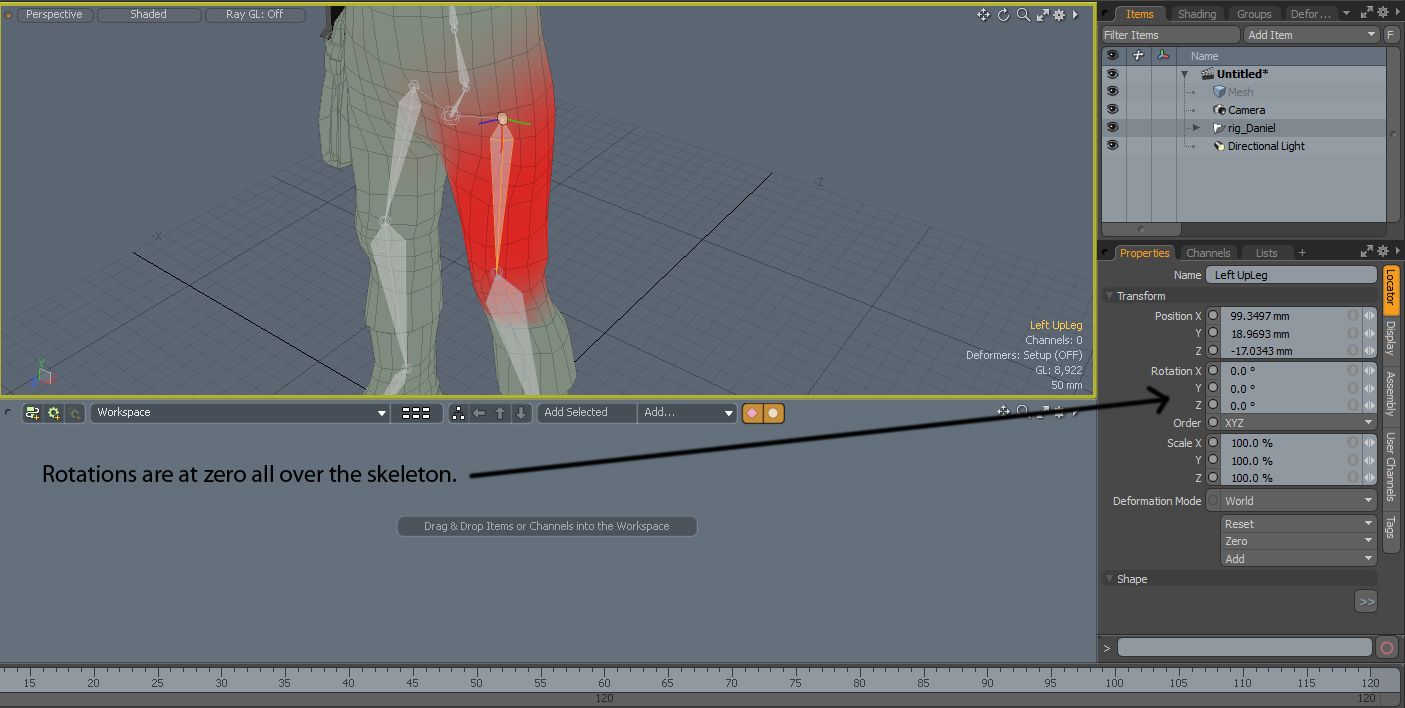
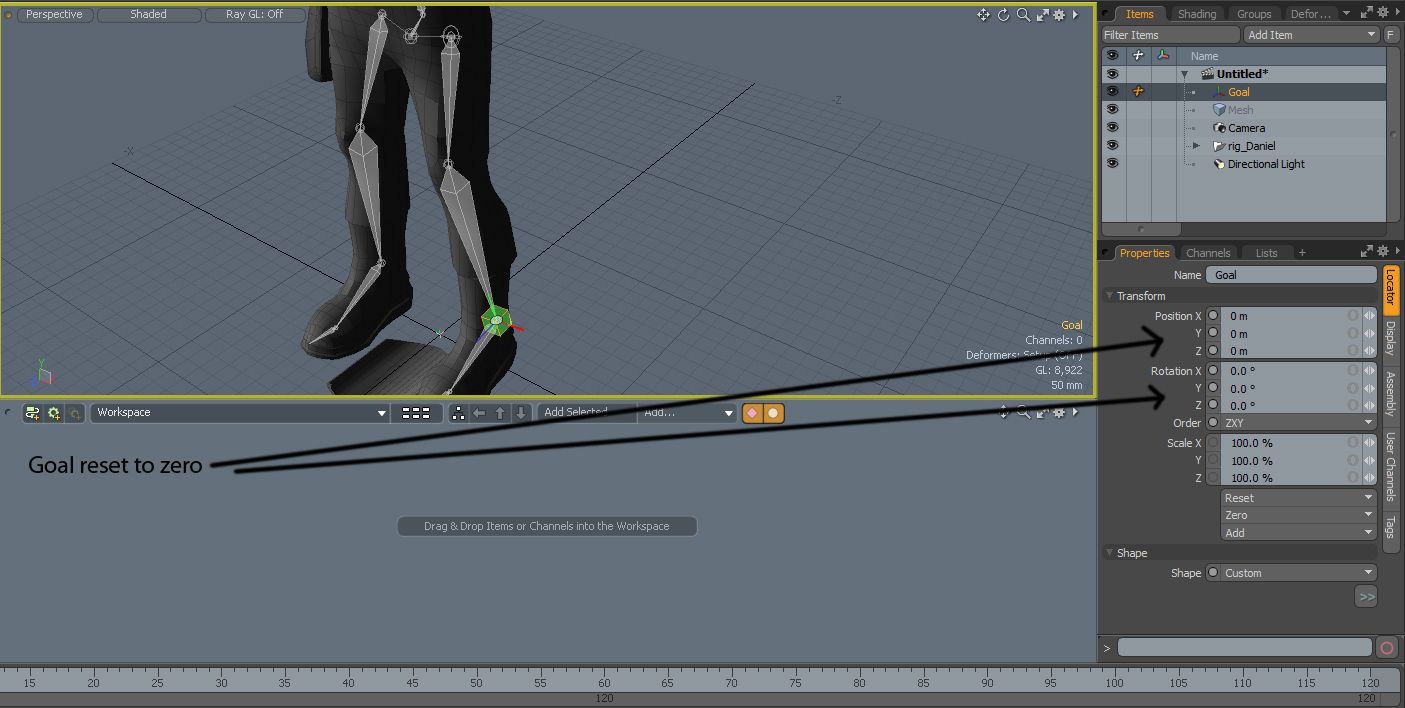
I have to manually reset to zero all values in all the joints and locators and goal and up vector........and the error become minimal when I apply the up vector but still does weird things.
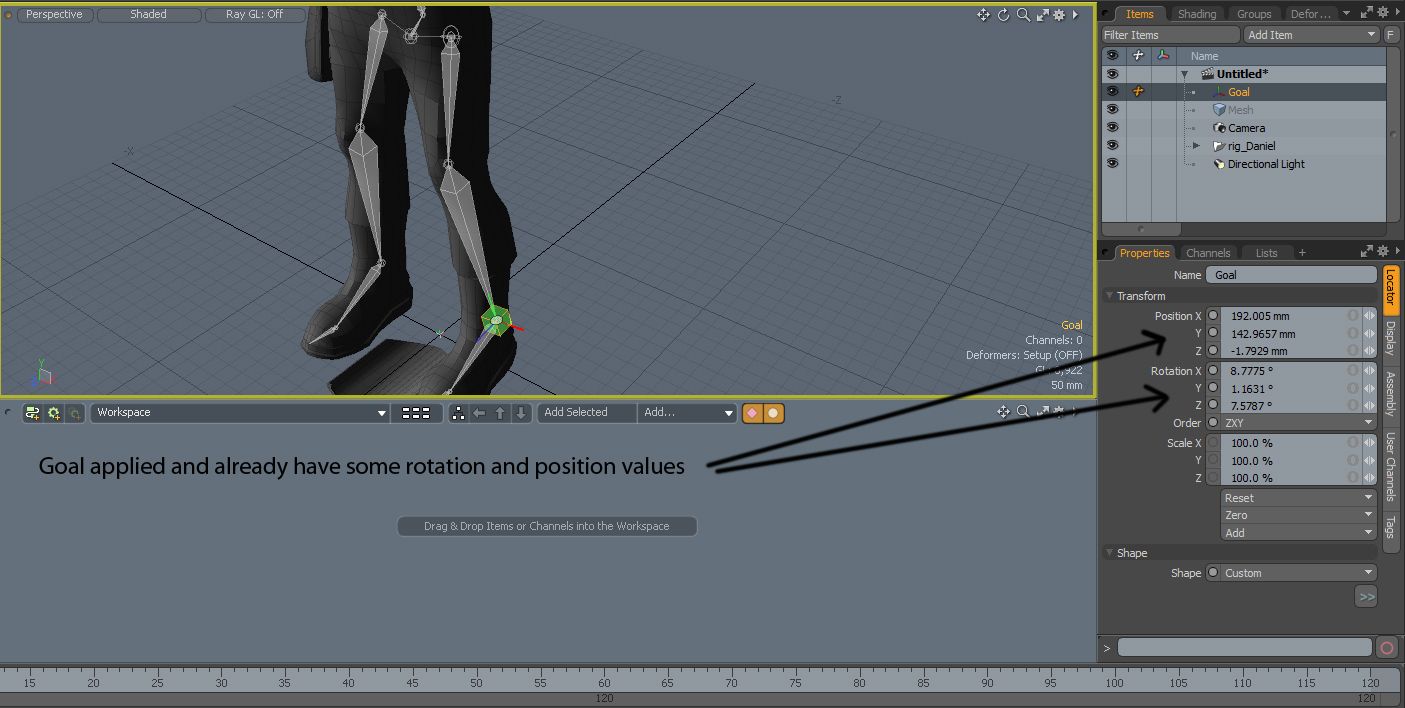
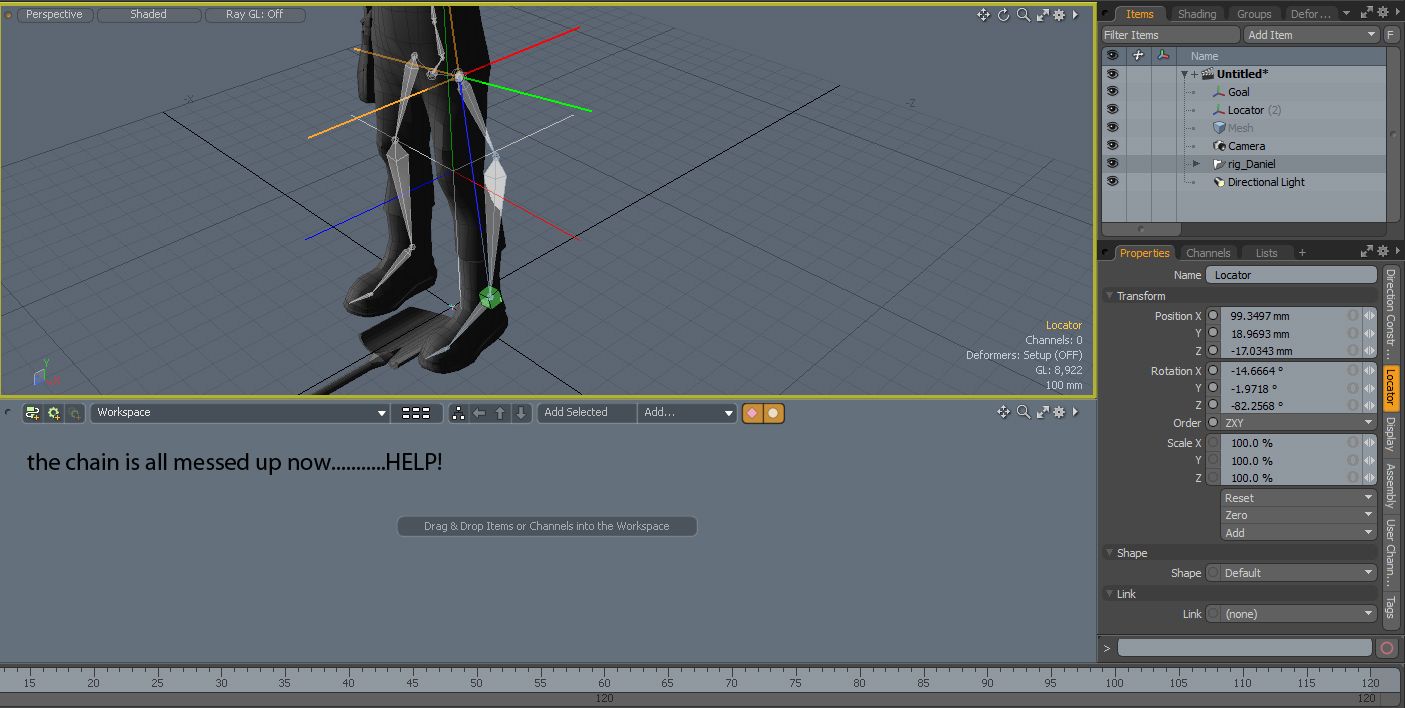
NOW the thing I recently found is that my joint chain is set to rotate on the X axis but the locator I constrain using the direction option points to the goal on the Z axis......that is problably the big issue (the jiont chain rotation plane is the X but the Ik rotates on Z), I been trying to constrain leaving the X axis pointing to the goal but so far I failed.
Please help?